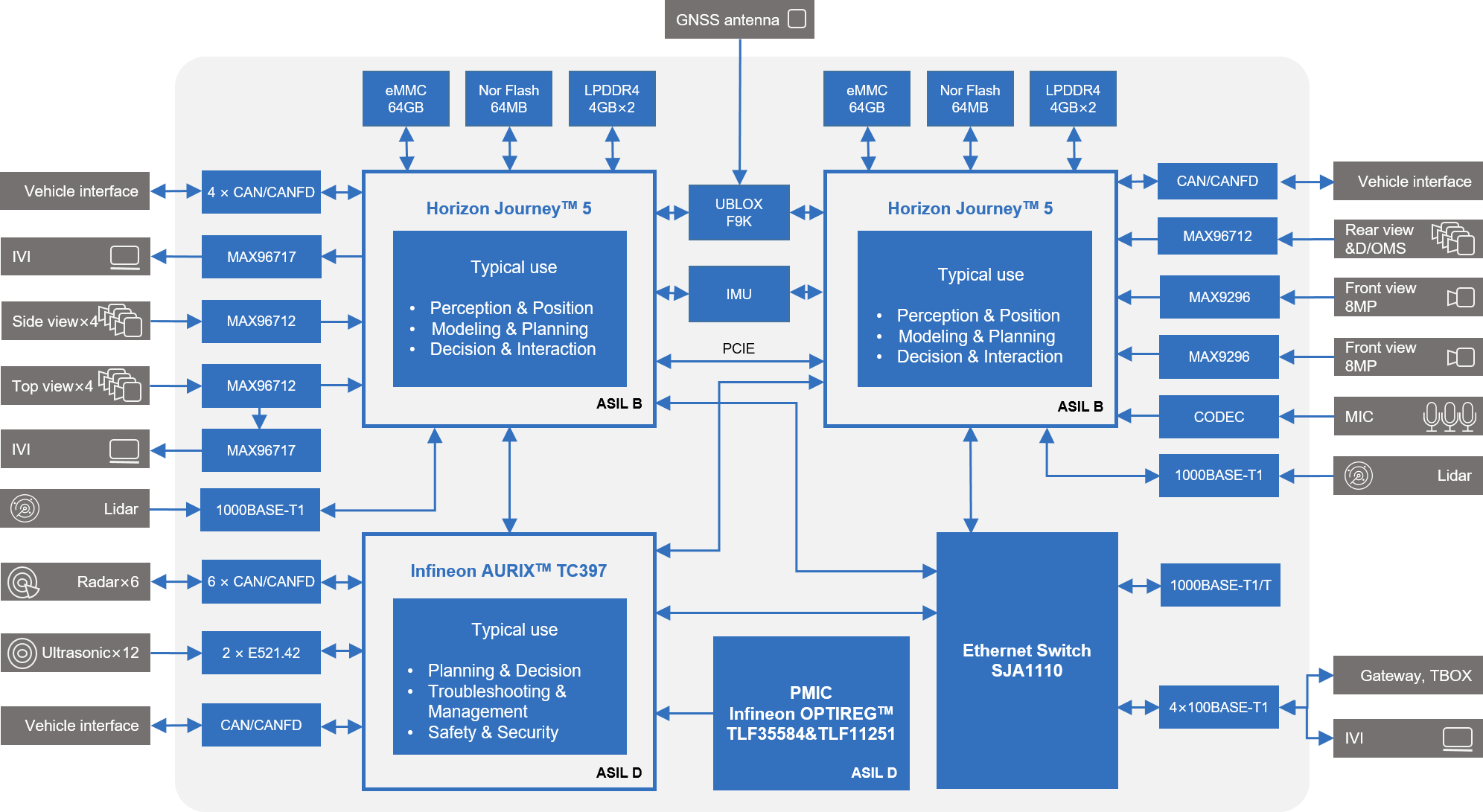
A Scheme Based on Double Journey™5
as Main Computing Unit
")
")
Infineon AURIX™ TC397,6 × 32-bit TriCore @300MHz
2 × Horizon Robotics Journey™ 5, each SoC:
BPU: Dual-core Bayes-architecture, computing power up to 128TOPS
CPU: 8 × Arm® Cortex®-A55@1.2GHz
Weight
Memory
Dimensions(L×W×H)
Operating Temperature
-40℃ ~ +85℃
Storage Temperature
Communication Interfaces
3 × 1000BASE-T1 (1 can be configured as 1000BASE-T/RJ45)
Debug Interfaces
USB2.0,Micro B x 1 (J5B UART)
USB2.0,Micro B × 1 (TC397 UART)
1 × RS232 (J5A UART)
1 × RS232 (J5B UART)
Video Input
14 × GMSL2, 84Gb/s
Video Output
2 × GMSL2, 6Gb/s, 1 for bypass output,1 for J5 output
1 × PPS Out
Operating Voltage
DC 9~36V
Quiescent Current
<100uA
Cooling Method
Liquid Cooling/Air Cooling
IP Code
IP52
Recommended Installation Position
Cabin, Trunk
Application of object recognition algorithm in autonomous driving scenario based on YOLOv5x on GDCU35B
Algorithm function: Object detection is the core module of autonomous driving technology.
When the detection algorithm is deployed, it is necessary to ensure both a small loss of
algorithmic accuracy and fast enough algorithmic operation.
The demo shows the detection results of the quantified YOLOv5x model on GDCU35B.
After the optimization of the algorithm toolchain, the accuracy loss of the fixed-point model
is about 1 point compared to the floating-point model, and the model on the Journey™5
can run at an FPS of about 75, which meets the real-time requirements of autonomous driving.
Technical Documentation